



Product Description
This Product is officially scheduled to release in November. Presales will ship in the order received.
The OMX Leader is a compact, lightweight input device designed for intuitive real-time control in Physical AI workflows such as imitation learning and teleoperation. When paired with the OMX Follower Arm, it enables smooth, low-latency human-to-robot motion mapping—making it an essential tool for end-to-end imitation learning pipelines.
Built around DYNAMIXEL-X actuators and fully compatible with ROS 2, the Leader provides 5 degrees of freedom plus a gripper, precise joint resolution, and USB-C connectivity. Its ergonomic design and lightweight 360g build make it ideal for extended use in research, prototyping, and educational environments.
Acting as the master interface in the Leader-Follower bundle, the OMX Leader captures motion data that can be applied directly in teleoperation or used to train AI models for physical behavior replication.
Note: 3D printed parts are not included unless selected in the options menu above.
Bundle Includes
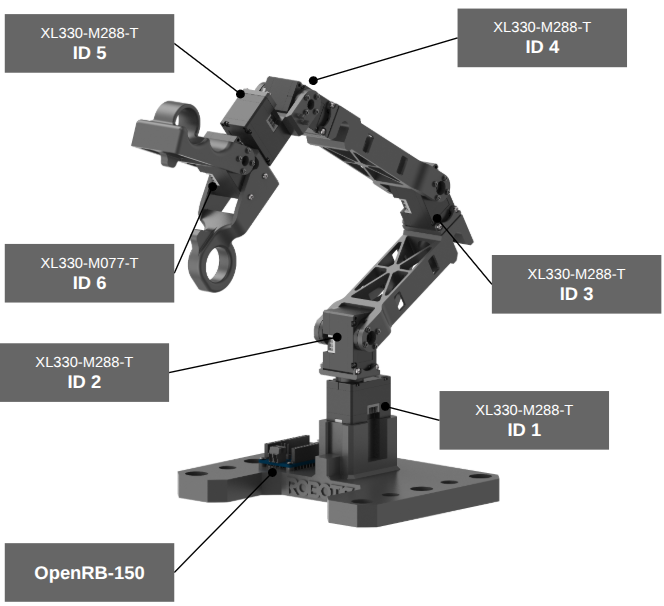
| XL330-M288-T | x5 |
| XL330-M077-T | x3 |
| OpenRB-150 | x1 |
OMX Leader Overview
Technical Specifications
| Item | OMX (Leader) |
|---|---|
| DOF | 5 + 1 Gripper |
| Full Reach | 335 mm |
| Weight | 360 g |
| Operating Voltage | 5 VDC |
| Joint Resolution | −π ~ π (rad), −2048 ~ 2048 (pulse/rev) |
| Joint Range | Joint 1: −270° ~ +360° Joint 2, 3: −120° ~ +90° Joint 4: −100° ~ +100° Joint 5: ±270° Joint 6: 0° ~ +100° |
| DYNAMIXEL-X Specification | Joints 1–5: XL330-M288-T Joint 6: XL330-M077-T |
| Host Interface | USB-C |
| Internal Communications | TTL |
| Baudrate | 1 Mbps |
| Software | ROS 2 |
