Product Description
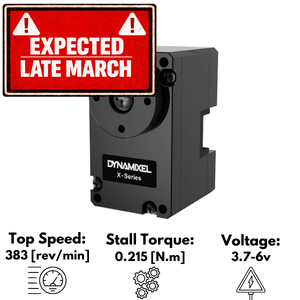
**This product is expected to restock in late March to early April. To secure your place in the fulfillment queue, please submit your order as soon as possible, as backorders for this item are continuing to accumulate.
Package Contents
| Item Name | Quantity | Description |
|---|---|---|
| XL330-M077-T | 1 | DYNAMIXEL Servo |
| Robot Cable-X3P 180mm | 1 | TTL 3P Cable (JST - JST) |
| PHS M2x6 TAP | 6 | Bolts for horn attachment |
| PHS M2x8 TAP | 10 | Bolts for frame attachment |

Supported Features

|
| Feedback Type | XL330-M288-T | XL330-M077-T |
|---|---|---|
| Position | ✓ | ✓ |
| Velocity | ✓ | ✓ |
| Current | ✓ | ✓ |
| PWM | ✓ | ✓ |
| Input Voltage | ✓ | ✓ |
| Temperature | ✓ | ✓ |
| Realtime tick | ✓ | ✓ |
| Trajectory | ✓ | ✓ |