

Quadruped Robots IROS - DYNAMIXEL Showcase
22nd Dec 2020
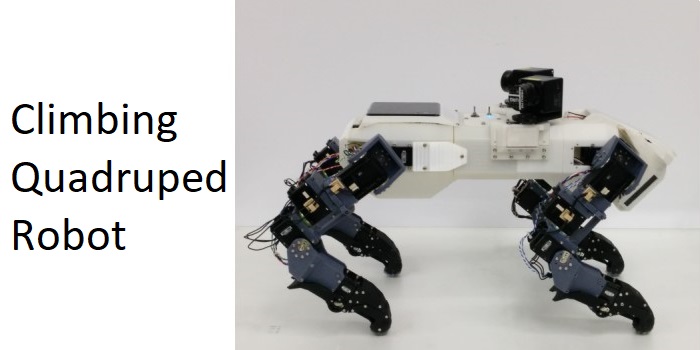
Quadruped Robots Can Climb Ladders!
In an abstract presented at the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), researchers, Azhar Aulia Saputra, Wei Hong Chin, Yuichiro Toda, Naoyuki Takesue, and Naoyuki Kubota presented a quadruped robot, featuring DYNAMIXEL servo motors, moving through a vertical ladder without handrail supports.
You can find the article written here.
Reference Papers
A Novel Capabilities of Quadruped Robot Moving through Vertical Ladder without Handrail Support
Azhar Aulia Saputra, Yuichiro Toda, Naoyuki Takesue, and Naoyuki Kubota. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). pp. 1448-1453. Macau, China, November 4-8, 2019
Dynamic Density Topological Structure Generation for Real-Time Ladder Affordance Detection
Azhar Aulia Saputra, Wei Hong Chin, Yuichiro Toda, Naoyuki Takesue, and Naoyuki Kubota. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Macau, China, November 4-8, 2019
If you have a DYNAMIXEL project, you would like to have showcased on ROBOTIS' blog, please contact america@robotis.com.