DYNAMIXEL -T & -R?
30th Apr 2020
A common question from our users is:
“What does the -T or -R stand for at the end of the DYNAMIXEL model name?”
What is the Difference Between DYNAMIXEL -T and -R?
DYNAMIXELs use asynchronous (half-duplex) serial communication, in either a TTL (-T) or RS-485 (-R) physical connection. This asynchronous (half-duplex) serial communication allows DYNAMIXELs to be daisy-chained on a common serial bus.
Most models of Dynamixel contain a suffix on the last digit of the model number (e.g. MX-64R ; XM430-W210T) which identifies the format of asynchronous serial communication used by the Dynamixel.
It is important to choose the same serial communication format for all your DYNAMIXELs to ensure compatibility in the intended system.
What is the Difference Between TTL and RS-485?
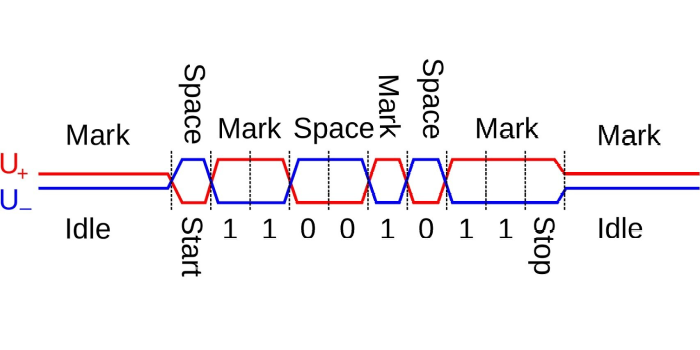
RS-485 (-R): A four-wire serial communication interface for Dynamixels where data is determined using the differential voltage of Data+ and Data- wires. As the difference in voltage between D+ and D- is constant, RS-485 is more robust against electrical noise and EMF interference during long-distance data transmission.
 (example signal)
(example signal)
TTL (-T): A three-wire serial communication interface for Dynamixels which uses a single unshielded data line to transmit data. TTL is more compact and uses less wires, which is ideal for smaller or simplified systems. TTL is suitable for most applications which do not require long-distance signal transmission (<30cm per cable). 0 (example signal)
(example signal)
Remember:
- DYNAMIXEL servos are designed to be connected in a network.
- Each DYNAMIXEL is assigned a unique ID# and daisy-chained on a common serial bus.
- DYNAMIXEL servos use asynchronous serial communication to enable real-time feedback between every DYNAMIXEL and its control source (the computer or controller board).
- TTL (-T) cannot be daisy-chained with RS-485 (-R)